I looked online for a 3D model for an Unimation Puma 560, and couldn't find any. Even if it's an old robot, it's still the most used robot for kinematics theory and sample calculations.
It was the first 321 serial robot.
Since I couldn't find a model, I decided to model one myself. The model was done using Alibre Design V11.2, and the text on the robot with v12 beta. The drawing used for dimensions can be found at samco's site.
Hopefully, one day, Sam will get his puma arm running, so the control won't be a pure simulation anymore.
The files were then converted to STL using Alibre, and from there to OBJ's using MeshLab.
You can download the model (licensed under GPLv2) here: as STL, OBJ, Alibre
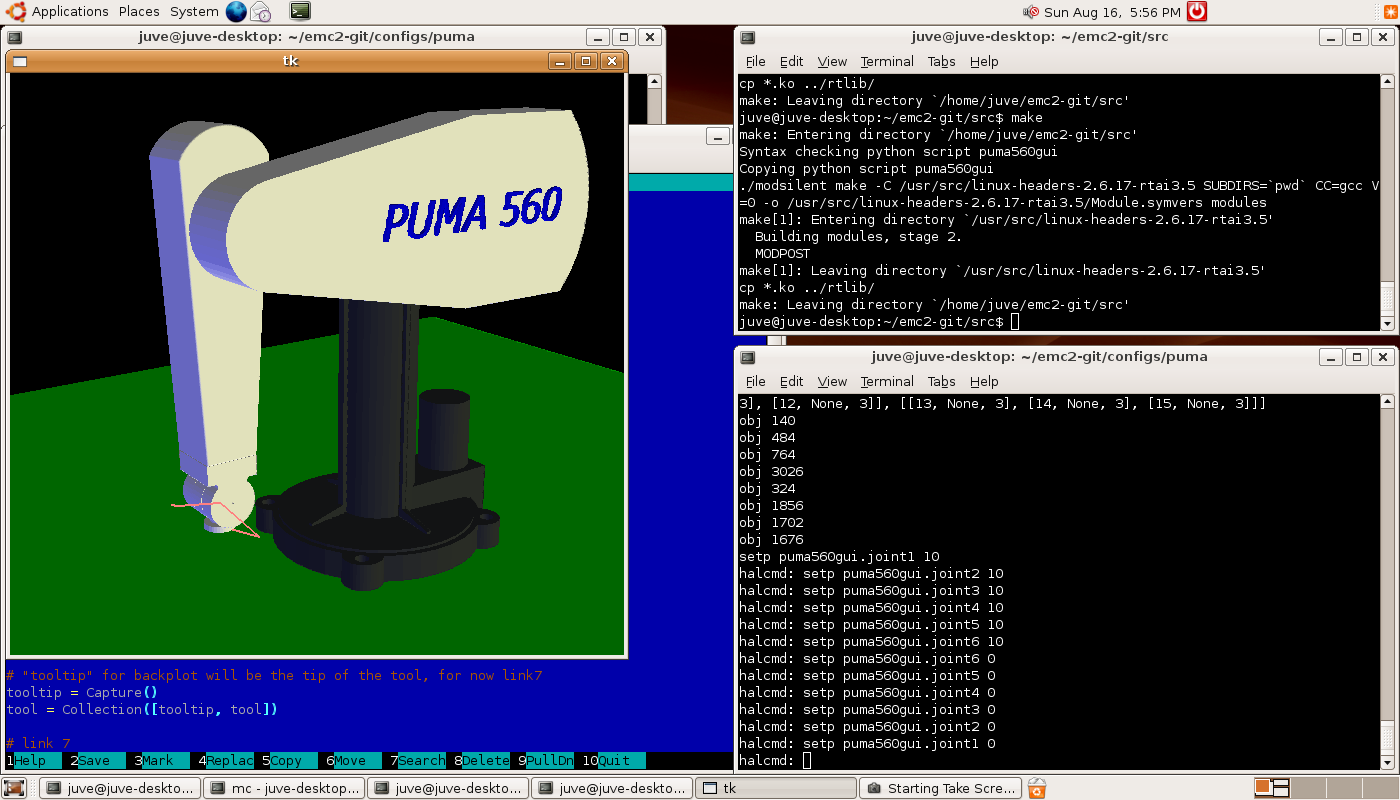
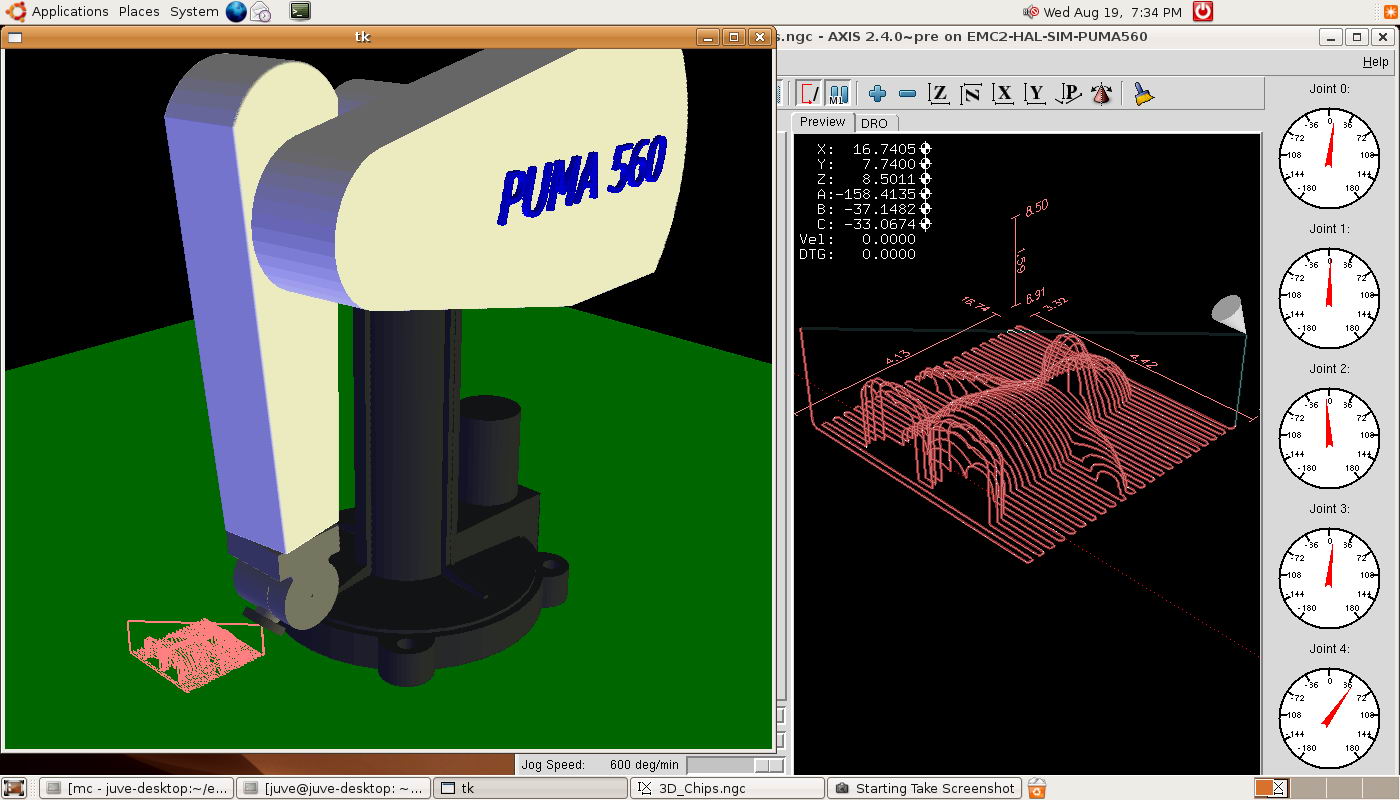
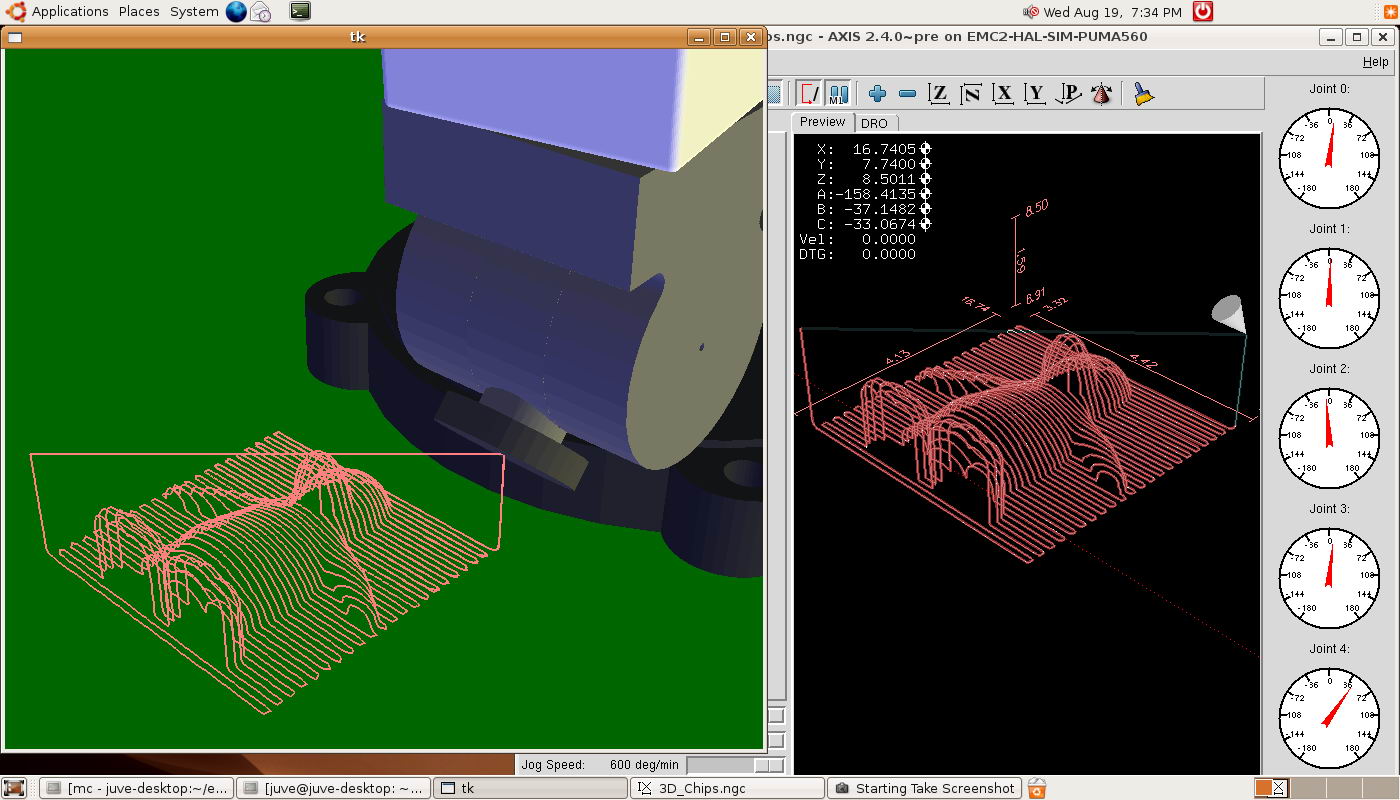
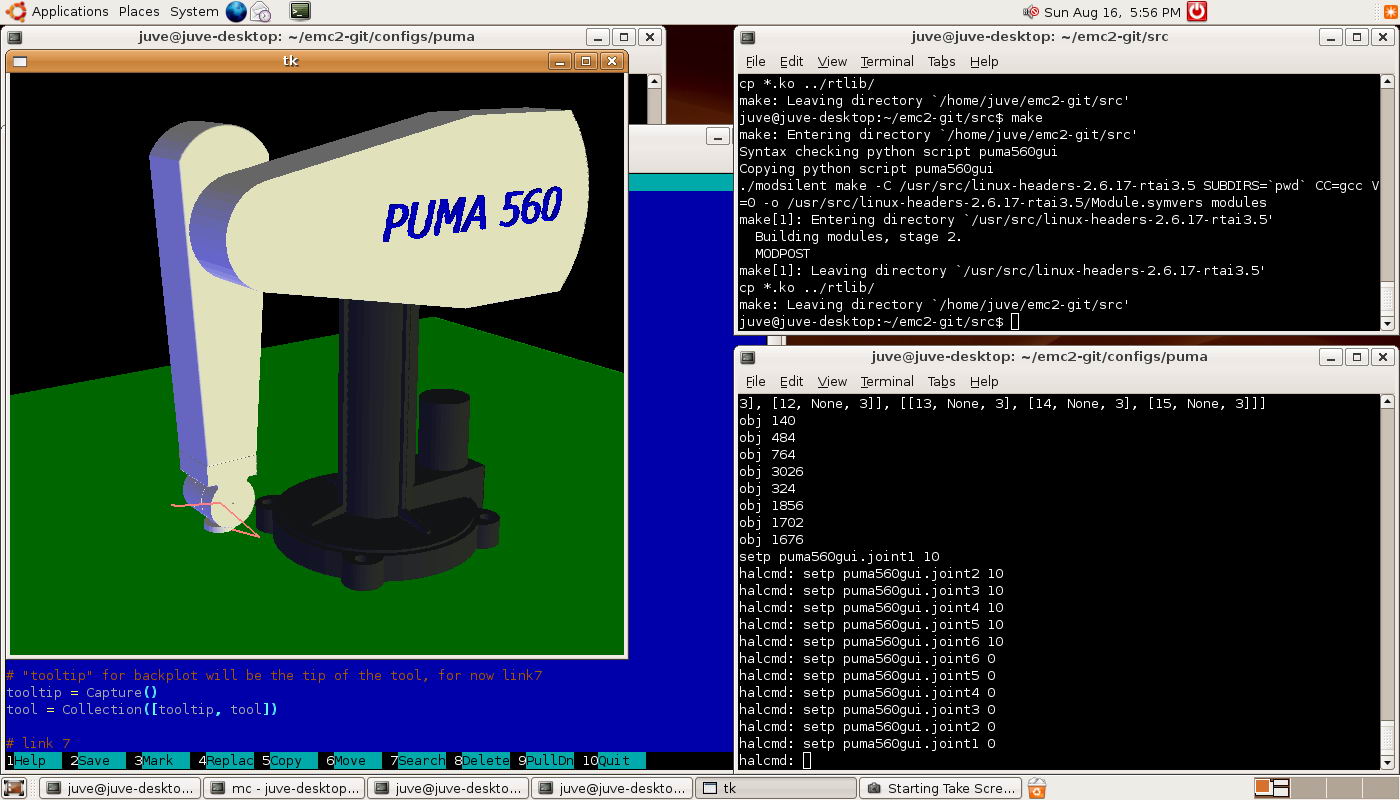
I created a vismach model that works with emc2 from this model, which can be found inside emc2.
Using genserkins (general serial kinematics) - thanks to Fred Proctor for those - one can drive the robot in emc2 both in joint and in world space.
After identifying the DH (Denavit-Hartenberg) parameters for the arm, the kinematics (both forward and inverse) are working dead-on.
| Joint | A | Alpha | D | |
|---|---|---|---|---|
| 0 | 0 | 0 | 26.45 | |
| 1 | 0 | 90 | -5.5 | |
| 2 | 17 | 0 | 0 | |
| 3 | 0 | 90 | 17.05 | |
| 4 | 0 | -90 | 0 | |
| 5 | 0 | 90 | 2.2 |

{kind=link}